来源:e键打印
发布时间:2015-06-04 09:14:15
浏览次数:
最近,耶鲁大学的研究人员开发出一款3D打印的机器人末端执行器(机械手)。该执行器造价低廉、功能强大,并可大大提高机器人的“手”的灵活性。重要的是采用了开源设计,堪为个人爱好者的绝佳选择。

使用3D打印机制作小型机器人已逐渐流行。但无论是个人爱好者还是商用机器人开发公司,如何让机器人的“手”(末端执行器)像人手那样活动都是个不小的难题。尽管研究人员想出了不少解决方案,但这些方案既昂贵又很难使用到其他装置,且几乎不可能被定制。
最近,为解决这一难题,耶鲁大学机械工程教授Aaron Dollar领导的Openhand项目组提出了卓有成效的3D打印解决方案。该团队开发的“手”成本低廉,且非常实用,能轻松捡起平躺在桌子上的硬币。尤为关键的是,它是开源的。
研究人员希望有更多的人使用这种开源的机器人“手”,借此使机器人设计出现有机转变,“这个项目打算打造一系列开源手的设计,并通过开源用户群体的贡献,产生大量有用的设计修改和变化提供给研究人员。因此,这个项目开发的手,设计必须简约、坚固耐用,尤其要适合反复迭代和在非结构化环境中运行。”
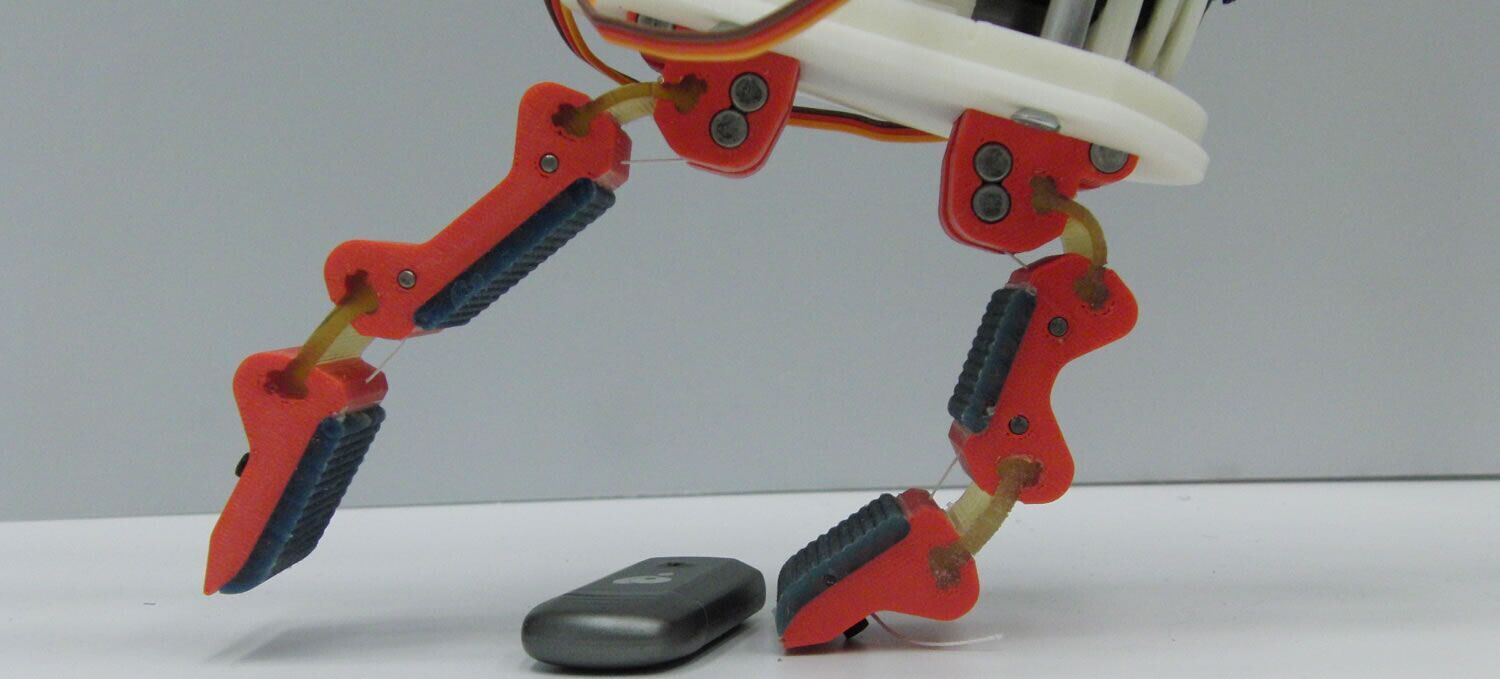
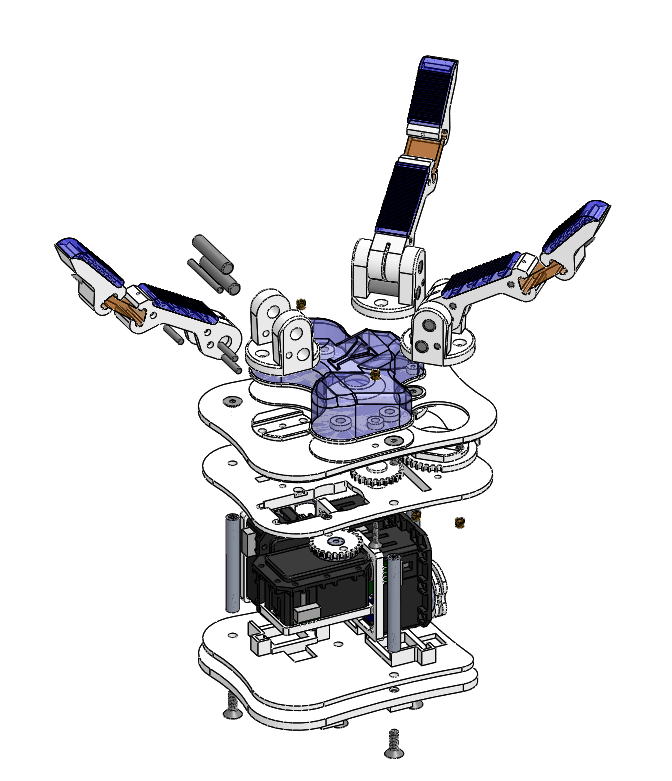
为真正做到如手使指,研究人员设计了一种转盘式柔绳传动(tendon-driven)的欠驱动手指。研究人员称这种欠驱动(underactuated)手能够根据接触物体的表面进行自适应调整,实现简单的抓握,而无需传感器或复杂的反馈系统。“这个设计范例将致动和手指元素分离开来,从而能够实现更大程度的定制。”
创客联盟了解到,Aaron Dollar的团队仅仅使用3D打印、树脂浇铸以及一些手工制作就完成了这一项目。他们使用3D打印机制造树脂模具和塑料手指,前者使用树脂浇铸成型,再进行固化和切割,这样就做出了机械手的“肌腱”和指垫。
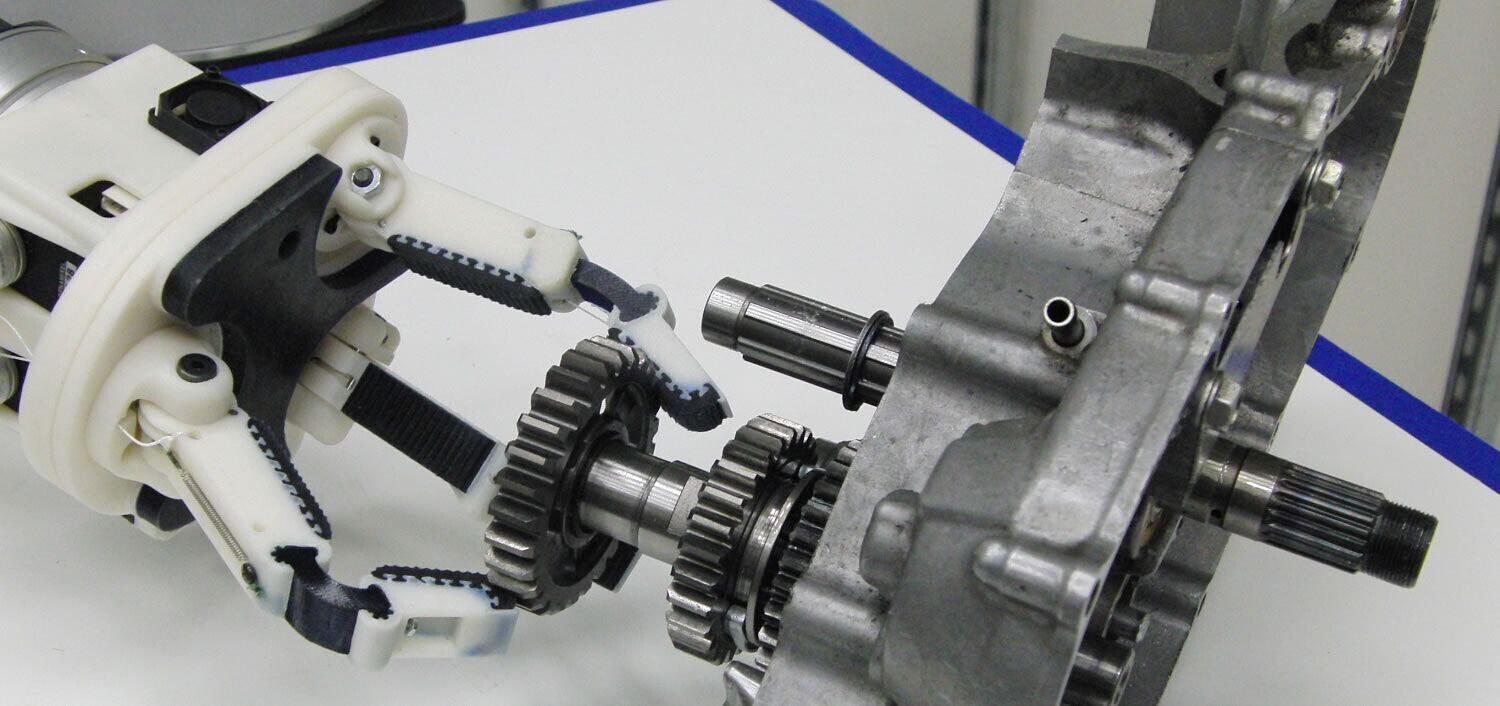
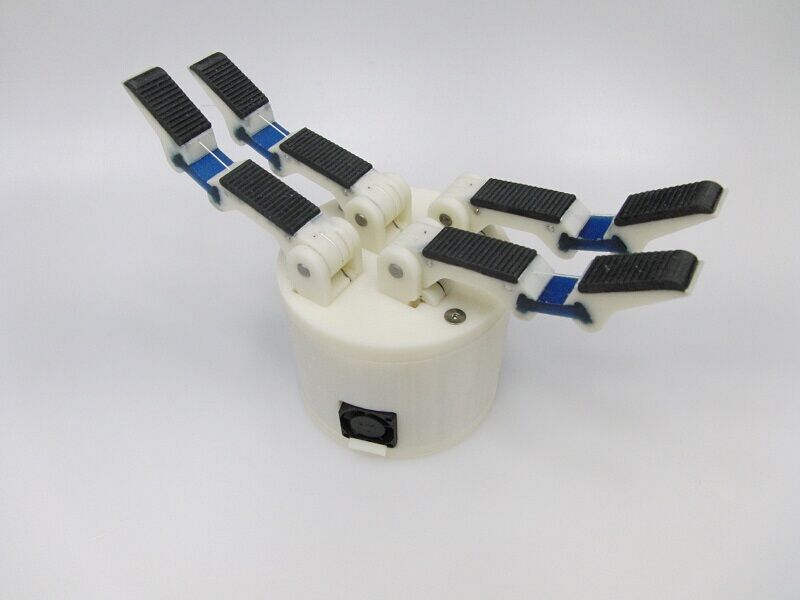
最终成型的手指强大且灵活,只需要极少的紧固件和其他功能部件。这些柔绳驱动的手指可以沿着物体的周围自然地蜷缩,并像真人的手那样均匀地分配力量。使用手上的指垫还可轻松拿起扁平的小物件,比如硬币。
项目组把这些柔绳驱动手指的开源软件和CAD文件设计为允许进行变量修改设置,创客们将可根据自己的需要调整这个机器人手设计,打印出不同参数的相关部件。
目前,该项目团队已经把相关文件上传至网上,有兴趣的创客们可去耶鲁大学官网下载相关文件。当然,创客联盟的小编也为大家备好了梯子:http://www.eng.yale.edu/grablab/openhand/index.html#about
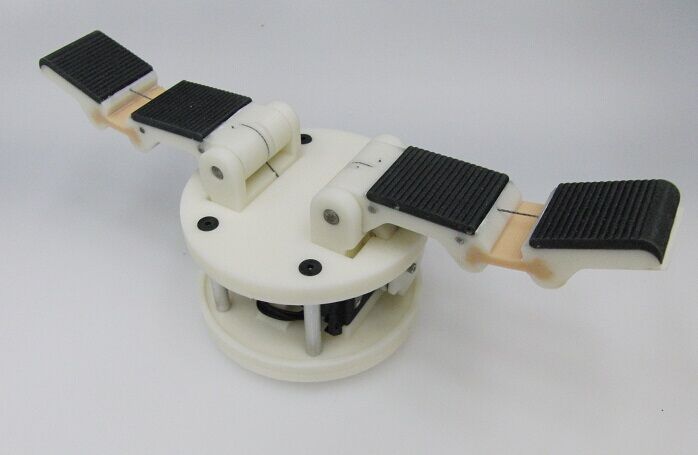
图为研究人员开发的基于同一机械原理的四种不同的端部执行器: